Ultimate FPV Beginner Guide // How To Build Long Range FPV Drone by Drone Mesh // Meine erster Long Range Build
von Ulf Schleth
If you want to read an english version of this text and don’t hate data capitalists as much as me, you could read it translated by google until it will be translated if it ever will be … i don’t think so … also be aware that there are links to youtube in the text below. Check the links if you also don’t like youtube and maybe use a proxy to access them.
Nachdem ich eine alte Spielzeug-Drohne zur FPV-Drohne umgebaut habe und mit der Mobula6 gemerkt habe, wieviel Wind und Spaß bürstenlose Motoren machen, habe ich überlegt, was ich baue: Eine klassische 5-Zoll-Drohne für Freestyle FPV? Eine kleinere Drohne zum Üben unterhalb der 250g-Grenze? Entschieden habe ich mich gegen alle Vernunft für eine 7″-Longrange-Drohne, wegen der längeren Flugzeit und wegen der Möglichkeit, etwas weiter zu Fliegen und gechillter cruisen und filmen zu können. Auf Youtube habe ich unter dem Titel „Ultimate FPV Beginner Guide // How To Build Long Range FPV Drone 2020“ dieses Video von Drone „dirty iron“ Mesh gefunden:

Range is not flighttime
Drone Mesh will da wie er selbst sagt eher eine Drohne mit langer Flugzeit als mit großer Reichweite bauen, es wäre dann aber besser gewesen, das ganze „How To Build Long Flighttime Drone“ zu nennen. Leider erwähnt er nicht, welche Flugzeit er mit seiner Drohne erreicht hat, vielleicht, weil sie nicht mehr als eine für 7″-Drohnen ganz normale Flugzeit erreicht, man weiß es nicht. In dem Video spricht er davon, später weitere Videos zu der Drohne zu veröffentlichen. Ich habe darauf gewartet, aber es kam nichts. Trotzdem dachte ich mir, um zu lernen ist es vielleicht ganz gut, sich kein perfektes Vorbild zu suchen und habe die Bauteile bestellt. Zu lernen gab es eine Menge.

building it (Foto: Ulf Schleth)
Erst denken, dann kaufen
Für einen wirklichen Longrange-Build eignet sich kein 2,4GHz-Empfänger, also habe ich mich gleich für Crossfire entschieden. Ich wollte gern auch Wegpunkte setzen können und deshalb war INAV das bessere Betriebssystem für den Flugcontroller als Betaflight. Ich habe mir etwas vorschnell einen reinen GPS-Empfänger dazubestellt, kurz darauf wurde mir klar, daß INAV zusätzlich auch ein Barometer und einen Kompass/Magnetometer braucht, um gut navigieren zu können. Der BN-880 ist perfekt dafür geeingnet, Kompass und Magnetometer in einem Bauteil, mit nur einer Stromversorung. Als Barometer ist der GY-63/MS5611 besser als ein BMP-280. Für den überschüssigen GPS-Empfänger findet sich bestimmt irgendwann eine Verwendung.
Be there or be I-Squared-C
Problem war nur, daß ich nach dem Anlöten der GPS-Kontakte auf dem Flugcontroller iFlight SucceX-E F405 (den banggood als V2 angepriesen, mir aber Version 1 geschickt hat) nur noch einen UART übrig hatte, sowohl Barometer als auch Kompass aber nicht über einen UART anzuschliesen sind, sondern über I2C. Und ich hatte nur 2 Pins. Fast hätte ich mir einen neuen Flugcontroller bestellt, aber dank SnowLeopardFPV habe ich im Forum intoFPV gelernt, daß I2C ein sehr interessantes Protkoll ist, bei dem man mehrere Bausteine parallel zueinander schalten kann.
In INAV gibt es leider kein einfaches Ressource-Mapping. INAV sollte auf UART3 auch I2C erkennen, aber das hat nicht funktioniert. Über Umwege hat sich der Verdacht erhärtet, daß Einstellungen in den INAV-Sourcen dafür verantwortlich sein könnten. Also habe ich mir die INAV-Sourcen heruntergeladen. In src/main/target/BETAFLIGHTF4/target.h müssen die Zeilen
#define BMP280_SPI_BUS BUS_SPI2 #define BMP280_CS_PIN PB3
so auskommentiert
//#define BMP280_SPI_BUS BUS_SPI2 //#define BMP280_CS_PIN PB3
werden und dann INAV wie hier beschrieben compiliert werden. Das dadurch entstandene Image inav_3.0.0_BETAFLIGHTF4.hex im Ordner build/ ließ sich dann mit dem INAV-Configurator auf den Flugkontroller flashen. Leider hat das immer noch nicht zum gewünschten Ergebnis geführt, aber das lag daran, daß die USB-Spannung allein nicht ausgereicht hat, um alle angeschlossenen Geräte zu versorgen. Nach dem Anschließen der 4S-Lipo-Batterie bzw. besser einer gleichwertigen Spannungsversorgung au dem Netzteil (mit Smokestopper dazwischen) war dann – Yippieh alles da.
Zum Wiederfinden der Drohen macht ein Buzzer Sinn, für eine Longrange-Drohne am besten einer mit eigenem Akku, der auch nach Verlust der Batteriespannung noch piept. Ich habe einen „GEPRC Super Buzzer“ verlötet, der „Vifly Finder“ scheint aber noch einen Tick lauter zu sein.
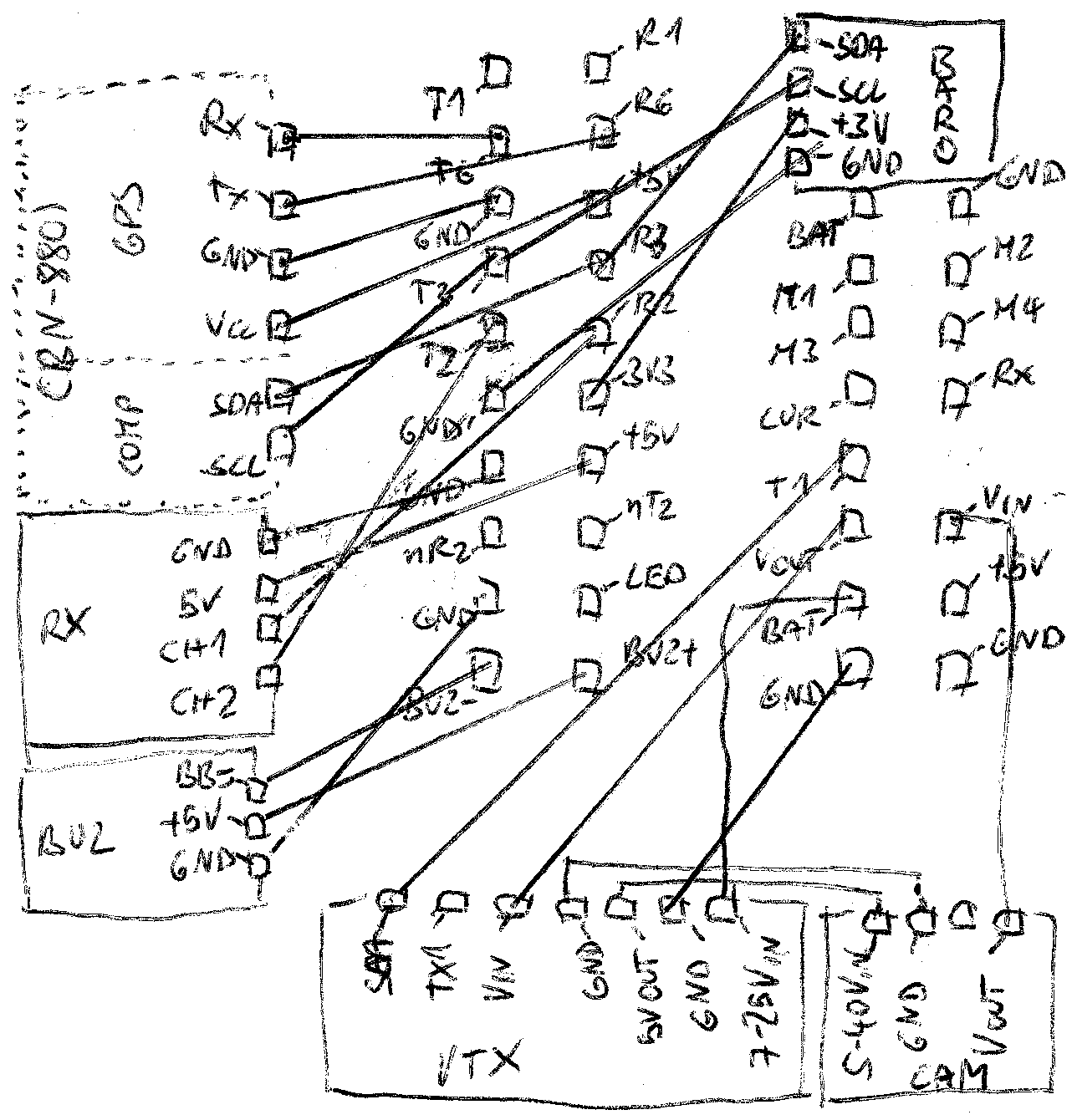
iflight SucceX-E F405 wiring „diagram“
Dann habe ich den BN-880 mit Kabelbindern an einem überflüssig mitbestellten Antennenhalter festgezurrt und mir eine „Immortal L“ gebaut, weil ich erst keine passende Antennenhalterung gefunden habe, die die Immortal T senkrecht montiert, wie man es idealerweise mit einer Crossfire-Antenne tun sollte. Später habe ich doch noch eine solhe Hlterung gefunden. Es war ganz hilfreich, nebenher noch die „FPV Drone Budget Build Full Tutorial“-Serie von Joshua Bardwell zu sehen, nicht nur zur Beantwortung der Frage wofür man denn einen Kondensator brauchen könnte.
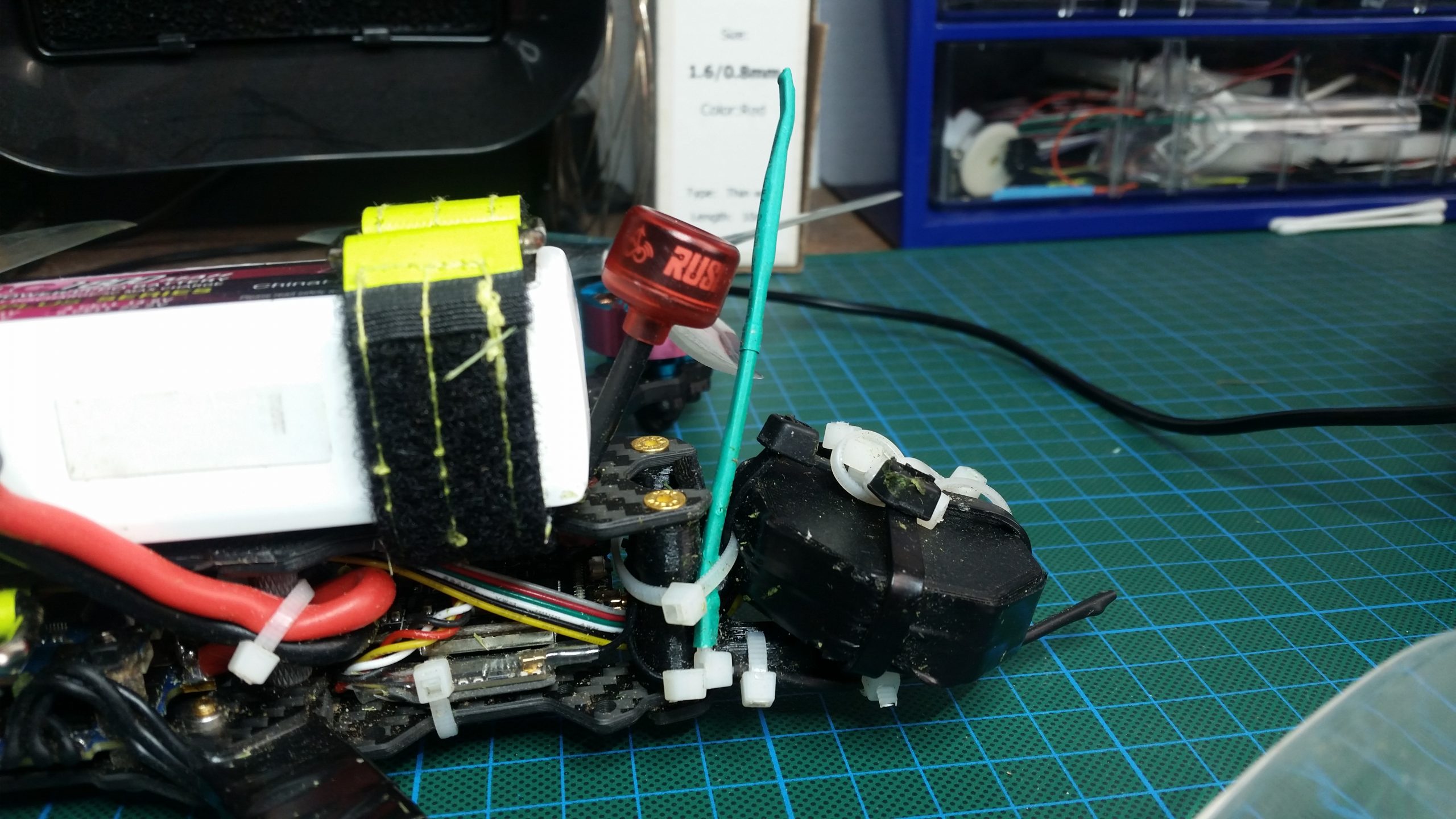
don’t ziptie your gps (photo: ulf schleth)
Die eigentliche Odyssee folgte noch: das Ausrichten des Kompasses. Sollte man unbedingt wach, bei klarem Verstand und vor allem machen, bevor man ihn anbringt. Danach geht auch, aber ist etwas unpraktischer. Am besten man fängt an, indem man den Kompass mit der Oberseite nach Oben hält und mit dem Aufgedruckten Pfeil mit Hilfe eines mechanischen Kompasses nach Norden. Man stellt in INAV die Ausrichtung auf CW0. Über CLI werden dann die interne Rotation des Chips im BN-880 um die Z-Ache (align_mag_yaw), die X-Achse (align_mag_pitch, „flip“) herausgefunden und eingestellt. Danach stellt man über align_mag_roll den Neigungswinkel ein, in dem der Kompass montiert wird. Nach einer halben Ewigkeit des Herumprobierens und kurz vor dem wahnsinnig-werden bin ich darauf gekommen, daß diese Werte für mich stimmen:
set align_mag_roll = 200 set align_mag_pitch = 1800 set align_mag_yaw = 900 save
Es sollte wirklich jemand einen Kompassausrichtungsassistenten für INAV programmieren und ins Netz stellen. Nachdem alles eingestellt, kalibriert und moniert war, wurde es Zeit für die erste Flugstunde. Es tut so gut, nach so langer Zeit das Gerät fliegen zu sehen.
3D printed farts
Leider war der 1800mAh-4S-Akku (mit dem ich ca. 7 1/2 Minuten Flugzeit erreiche) so dimensioniert, daß er die nach dem Vorbild von Drone Mesh montierte Antenne fast zerquetscht hat. Der Videoempfang war furchtbar. Es musste eine neue Video-Antenne, ein Mount dafür und auch für den BN-880 her. So wichtig wie Kompass und GPS für Navigationsfunktionen sind, war es doch keine gute Idee, sie einfach mit Kabelbindern zu befestigen. Ich habe etwas auf Thingiverse gefunden, doch wo drucken? Ein professioneller Anbieter wollte 30 Euro für jedes einzelne der kleinen Plastikteile.
Im Forum FPVRacingForum habe ich gefragt, wo man das unter Umständen günstiger bekommt. Daraufhin schlug mir eine Welle von freundlichen Tips und überwältigender Hilfsbereitschaft entgegen. Die Forenteilnehmer Erny und Yamie haben nicht nur sofort das 3D-Modell von Thingiverse angepasst, am Ende hat mir Yamie die Teile auch noch zu einem echt guten Preis mit seinem 3D-Drucker gedruckt und zugeschickt. Dabei waren auch ein paar XT60-Halter, die habe ich aber gar nicht benutzt, Kabelbinder schienen mir doch praktischer, je nachdem von wo das Batteriekabel kommt.

It’s a feature, not a bug
Wieder in der Luft war das Videobild auf den Goggles immer noch ziemlich schlecht, nach einem Sturz sogar noch schlechter. Nachdem ich ein Video von Paweł Spychalski zu Drone Meshs Videosender Eachine TX805 gefunden habe, war klar, wieso. Dieser VTX ist zwar billig, aber kein guter Sender, schon gar nicht für Longrange. Der Einbausender in meiner alten Eachine TX02Pro hatte ein besseres Bild. Das lag zum einen an der geringeren Sendeleistung des TX805, zum anderen aber auch noch daran, daß die wesentlich teureren Runcam-Kameras absichtlich eine Art Anti-Kantenglättung verwenden, um Konturen besser sichtbar zu machen. Das lässt alles etwas „pixelig“ erscheinen. Das ist ganz nützlich, wenn man auch ein wenig Freestylen will, fürs reine Longrange-Cruisen, oder wenn man halt einfach auf ein schöneres Bild steht, sollte man nach einer anderen Kamera Ausschau halten. An Stelle des TX805 baute ich einen TBS Unify Pro32 HV ein. Dabei ist mir aufgefallen, daß durch den Sturz der SMA-Antennenconnector abgebrochen war.
Es ist nur heiß, nicht kaputt
Beim Umbau fiel nach ein paar Minuten Sendezeit plötzlich das Bild in den Goggles aus. Die OSD-Anzeigen waren noch zu lesen, aber der Hintergrund war schwarz. Ich habe alle Kabel und anliegenden Spannungen untersucht bis ich zu dem Schluss gekommen bin, daß die Kamera die Ursache war. Sie startete sich in immer kürzer werdenden Abständen neu und. Beinahe hätte ich sie dann kaputtrepariert bis ich auf die Idee gekommen bin, sie mit einem Kaltluftföhn zu kühlen. Und siehe da: Die Kamera lief ohne Probleme. Und sie tut es auch in der Luft. Also kein Grund zur Panik.
Luftmonster
Es ist schon ein Monster geworden, im Vergleich zu dem Federgewicht das ich vorher geflogen bin. Dafür hat sie kaum Probleme mit etwas Wind. Das Geräusch ist viel angenehmer als bei den kreischenden 5″-Drohnen, es fühlt sich an, als würde man einen fliegenden Rasenmäher steuern. Ich habe immer noch etwas Angst, mich versehentlich mit ihr zu enthaupten, aber das vergeht langsam. Ach ja: beware of stick commands: Wenn Du ausversehen ein falsches stick command eingibst, ist schnell mal der Gyro falsch kalibirert und das nächste position hold/return to home wird schnell zum Desaster.
Credits: SnowLeopardFPV, Yamie, Erny. bffigjam, wildflieger, Stefan73, Rüdiger and others
Teile
Geprc MARK4 295mm 7 Zoll Frame Kit for RC Drone FPV Racing
4 PCS GEPRC 3D Printed TPU Damping Mount Holer for 16×16 Brushless Motor Mark2 / Mark4 / LC7 Frame Kit RC Drone FPV Racing – Black
MS5611 GY-63 Atmospheric Pressure Sensor Module IIC/SPI Communication
Geprc Mark4 HD5 Spare Part 3D Printing TPU Camera Mount Seat for RC Drone FPV Racing (hinten mit Kabelbinder befestigt)
Beitian BN-880 Flight Control GPS Module Dual Module Compass With Cable for RC Drone FPV Racing
Suleve™ M3NH1 M3 Nylon Screw Black Hex Screw Nut Nylon PCB Standoff Assortment Kit 300pcs
2 Pairs DALPROP CYCLONE T7056C 7inch Crystal 3-blade Propeller for RC FPV Racing Drone
4x Racerstar AirA 2508 BP Edition 4~6S 1200KV 1700KV Motor for Mark4 5/6/7inch Long Range RC Drone FPV Racing MultiRotors – 1200KV
RunCam Eagle 3 1/2.8 Starlight CMOS 1000TVL 0.001Lux 2.1mm FOV 155° Lens Freestyle FPV Camera NTSC 4:3/16:9 Switchable For RC Racing Drone
GEPRC Super Buzzer 100DB Flight Alarm Built-in Battery LED Light for Betaflight Flight Controller FPV Racing RC Drones
iFlight SucceX-E F4 V2.1 Flight Controller OSD & 45A Blheli_S 2-6S 4 In 1 Brushless ESC Stack 30.5×30.5mm for RC Drone Frame
TBS Crossfire Nano RX
CNHL G+PLUS 1800mAh 14.8V 4S 70C Lipo Battery For FPV
https://www.thingiverse.com/thing:3907990
TBS Unify Pro32 HV (MMCX) (incl. MMCX->SMA connector)
A Pair Rush Cherry RHCP MMCX Right Angle 1.2dBi 5.8Ghz FPV Racing Antenna for RC Drone // Antennenfreund Double Quad 5,8Ghz RX Black Edition RHCP SMA male mit geradem Stecker
Kabelbinder, Isolierband, doppelseitiges Klebeband, etc.
Kommentar schreiben